This AUV is one of those projects that immediately becomes more serious the moment you think about where it has to work. On a bench, a lot of designs look fine. Underwater, every shortcut becomes expensive. A hull has to stay sealed, the internal layout has to remain serviceable, the power system has to stay stable, and the sensing stack has to be trustworthy enough that autonomy is even worth attempting. That is exactly what drew me to it.
I did not want to build a one-off demo that only looks convincing in a render or for thirty seconds on a table. I wanted to build a platform I could iterate on honestly: something modular, testable, and structured enough that each subsystem could be validated on its own before the full vehicle earned the right to go underwater.
The slide deck for the project labels it simply as Autonomous Underwater Vehicle (AUV), with the note Project in progress (Feb 2026 – Present). What follows is the full substance of that deck, but turned into a readable project post with the visuals embedded directly here instead of attached separately.
Objectives
The initial objectives were very direct:
- Autonomous Navigation
- 15m Maximum Depth
- Live Video Transmission
- Depth sensing capabilities
- Modularity for future upgrades
I still think that list captures the project well. It is ambitious enough to be interesting, but concrete enough that each goal has design consequences. If you want autonomous navigation, you need room for sensing and control. If you want 15 meters of depth capability, the hull and sealing decisions matter immediately. If you want modularity, you cannot let the inside of the vehicle become a tangled one-time layout.
Mechanical concept
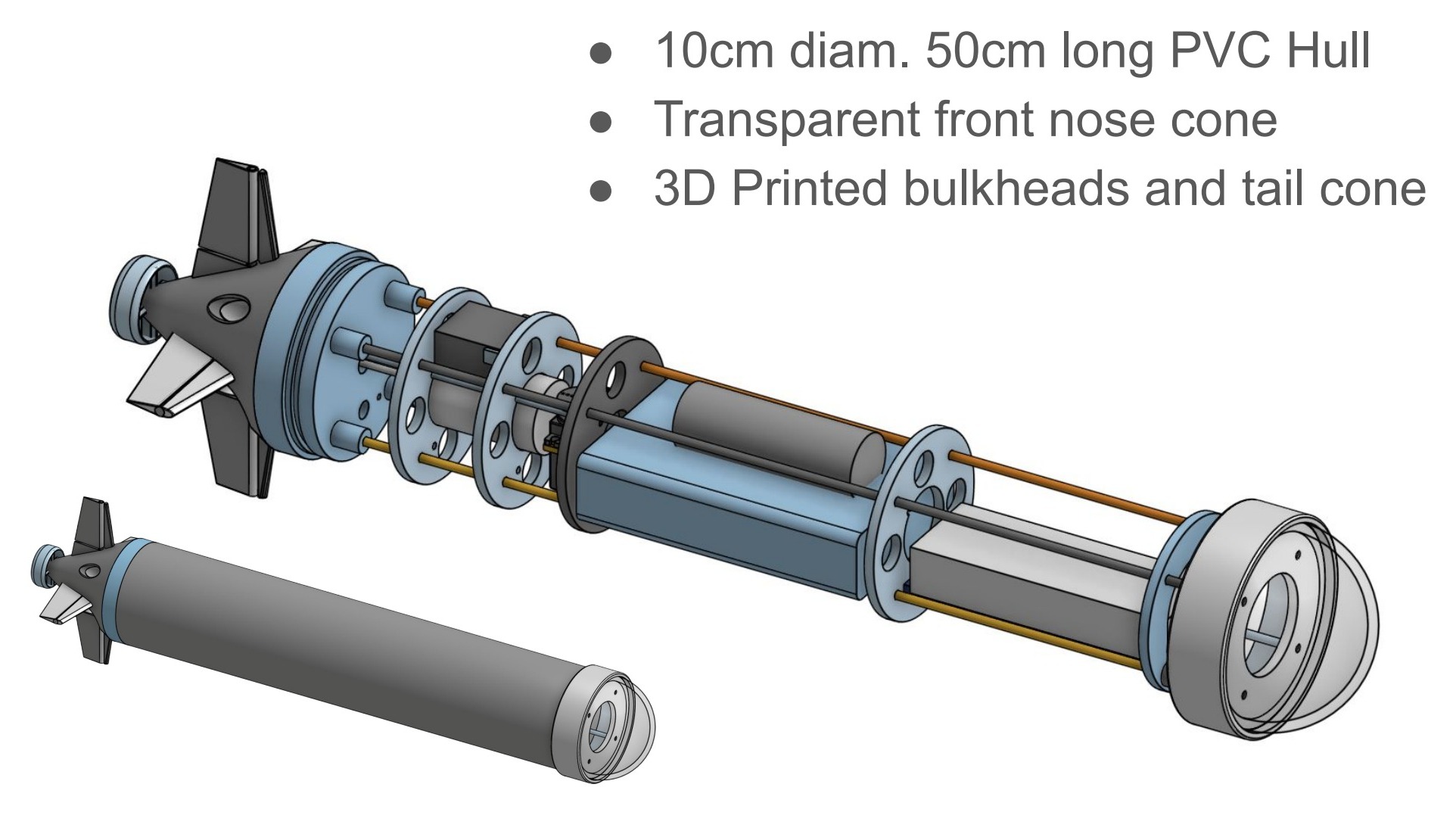
The core mechanical concept in the deck is summarized with three points:
- 10cm diam. 50cm long PVC Hull
- Transparent front nose cone
- 3D Printed bulkheads and tail cone
I like this approach because it is practical rather than performative. PVC is cheap, available, easy to work with, and forgiving when the structure is still evolving. The transparent nose cone gives the forward camera a clean view, while the bulkheads and tail cone help turn the hull into a controlled internal architecture instead of a tube that happens to contain electronics.
For an underwater project, that matters a lot. A nice-looking shape is not enough. You need something you can reopen, inspect, and revise without turning every single modification into a full rebuild.
Internal layout
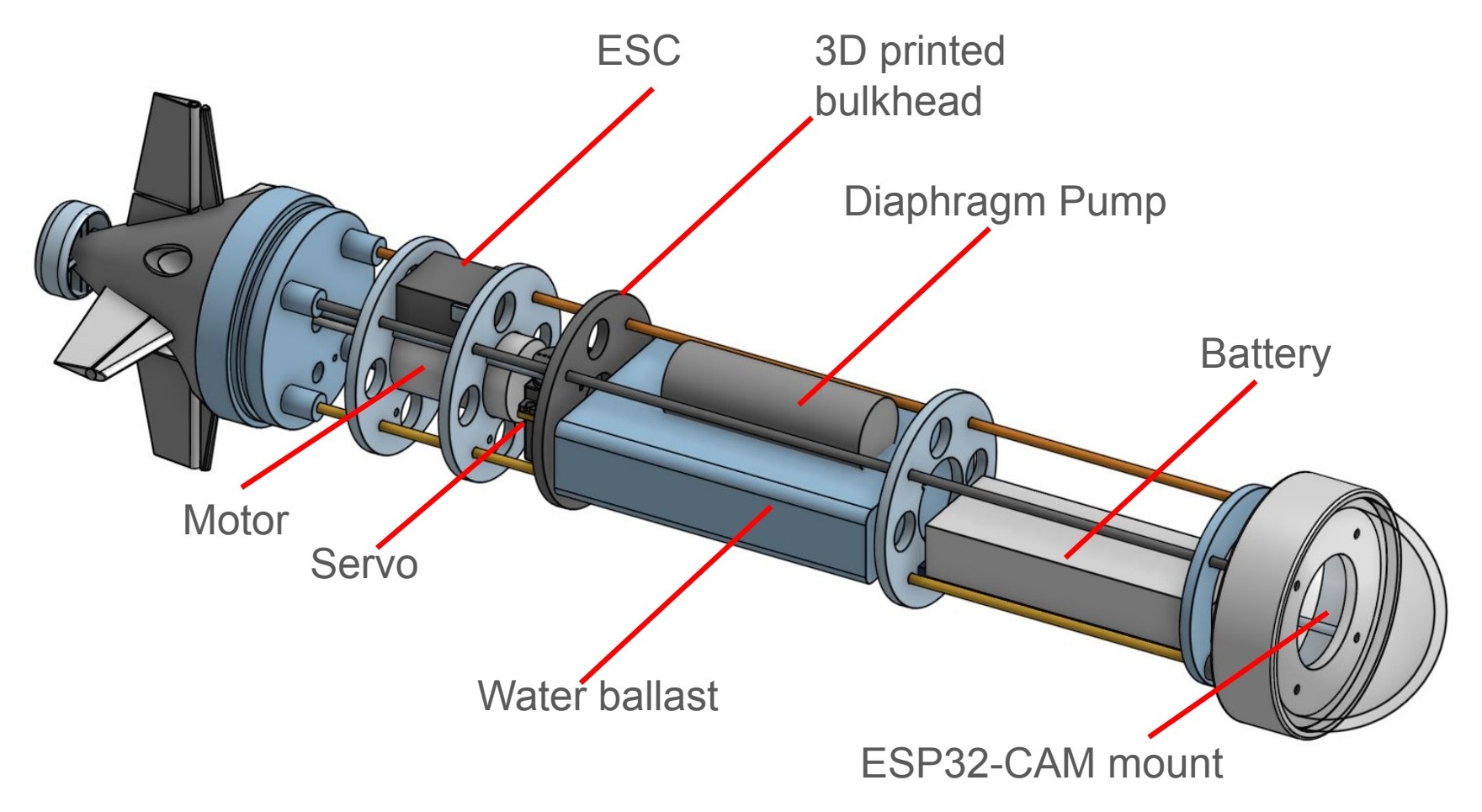
The labeled subsystem layout in the PDF identifies the following internal elements:
- ESC
- Servo
- Diaphragm Pump
- Water ballast
- Battery
- ESP32-CAM mount
- Motor
- 3D printed bulkhead
This is the kind of slide I especially like because it shows that the challenge is not just “what parts are in the vehicle,” but how those parts coexist physically. The layout has to make sense mechanically, electrically, and operationally. There needs to be a path for propulsion, a place for ballast control, room for power, and enough structure that the camera and sensors are not treated like afterthoughts.
That is also where modularity becomes real rather than theoretical. A system is only modular if you can actually separate functions, access them, and revise them without destroying everything around them.
Electrical system architecture
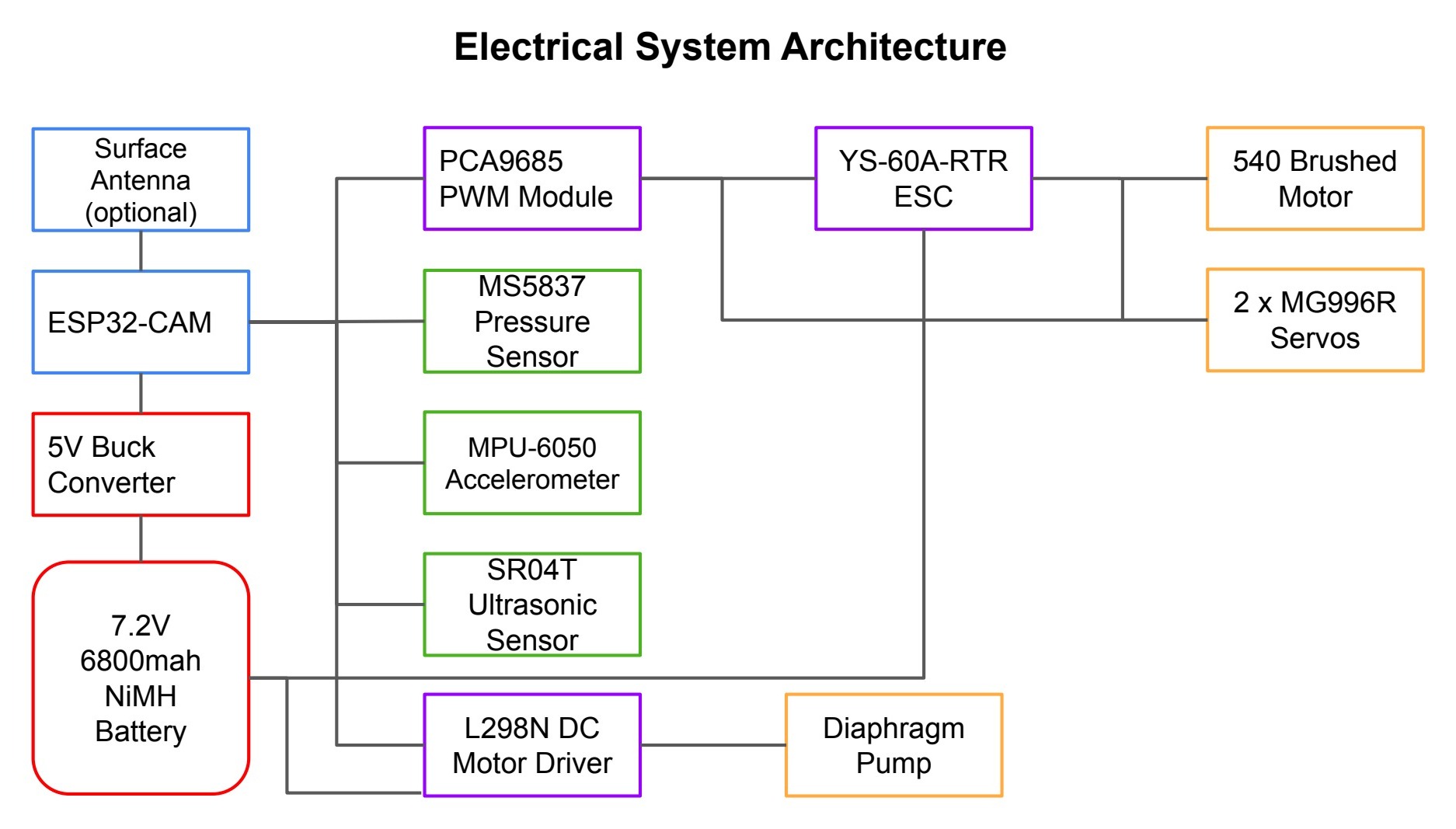
The electrical architecture in the deck is built around these components:
- 7.2V 6800mah NiMH Battery
- 540 Brushed Motor
- YS-60A-RTR ESC
- ESP32-CAM
- 2 x MG996R Servos
- PCA9685 PWM Module
- L298N DC Motor Driver
- SR04T Ultrasonic Sensor
- MPU-6050 Accelerometer
- MS5837 Pressure Sensor
- Diaphragm Pump
- 5V Buck Converter
- Surface Antenna (optional)
What I like about this stack is that it is clearly trying to separate propulsion, sensing, control, and power conversion into understandable blocks. That is exactly the right instinct for a project like this. Once systems go underwater, debugging becomes slow, and the fastest way to lose time is to build something where every failure looks like every other failure.
If someone wanted to build something similar, this is the part where I would strongly recommend resisting the temptation to rush integration. Bring up power first. Then propulsion. Then sensing. Then communications and control logic. If you only learn whether the architecture works after everything is inside the hull, the project becomes much harder than it needs to be.
If you want the deeper board-level side of this vehicle, I also wrote a companion post here: AUV Interface PCB for High-Speed Differential Signaling and Control.
Assembly progress
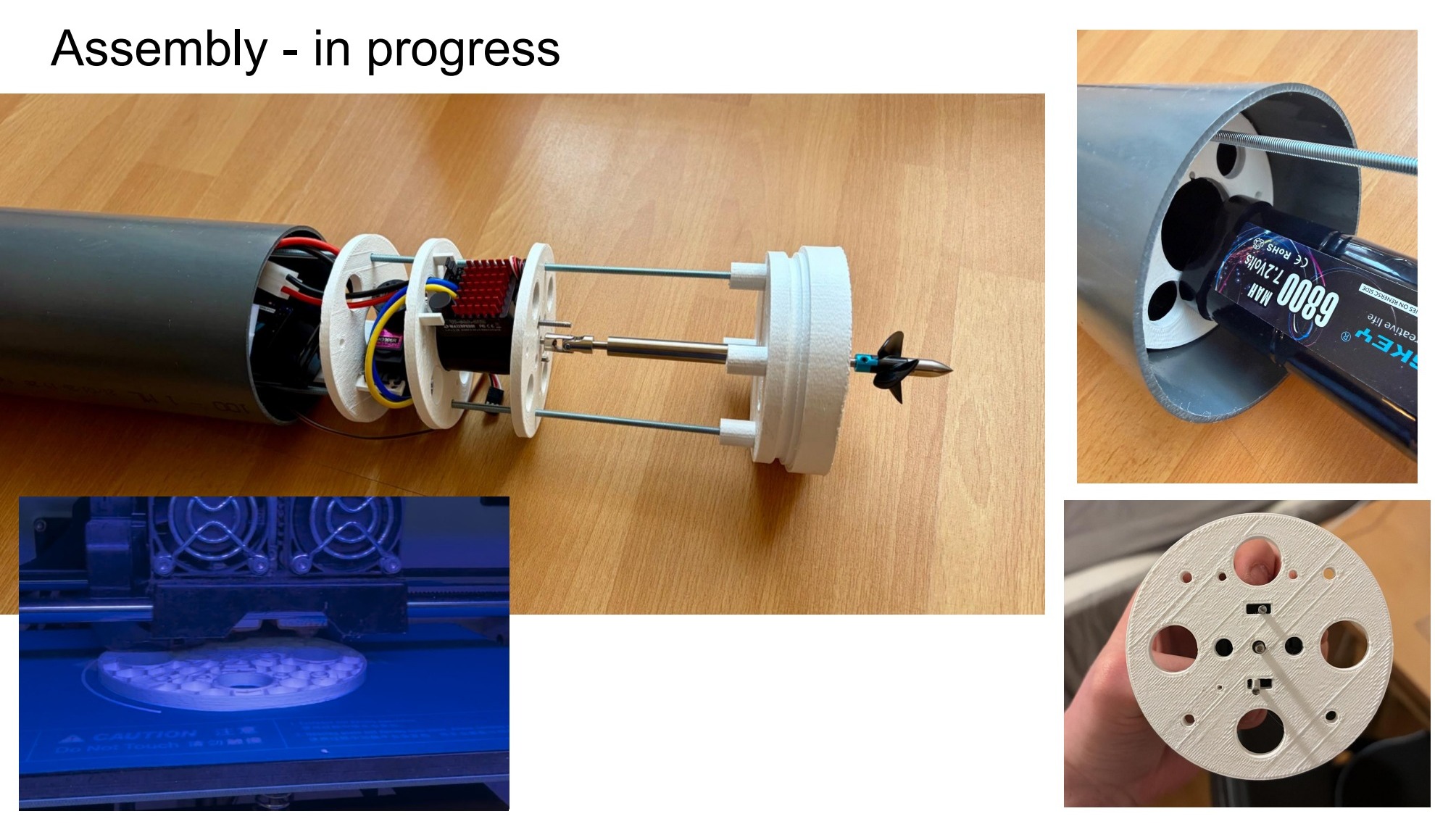
The deck labels this stage simply as Assembly – in progress, which feels accurate. I like showing this phase because it makes the work feel honest. Projects like this do not emerge as finished polished systems. They move through partial integration, printed prototypes, bench tests, fit checks, and plenty of awkward in-between states where you are still proving whether the physical design is actually workable.
That is also the stage where a project becomes endearing to me. There is something satisfying about seeing the idea leave CAD and enter the world of real materials, tolerances, wiring, and physical constraints. It stops being an abstract concept and starts becoming a machine.
Next steps
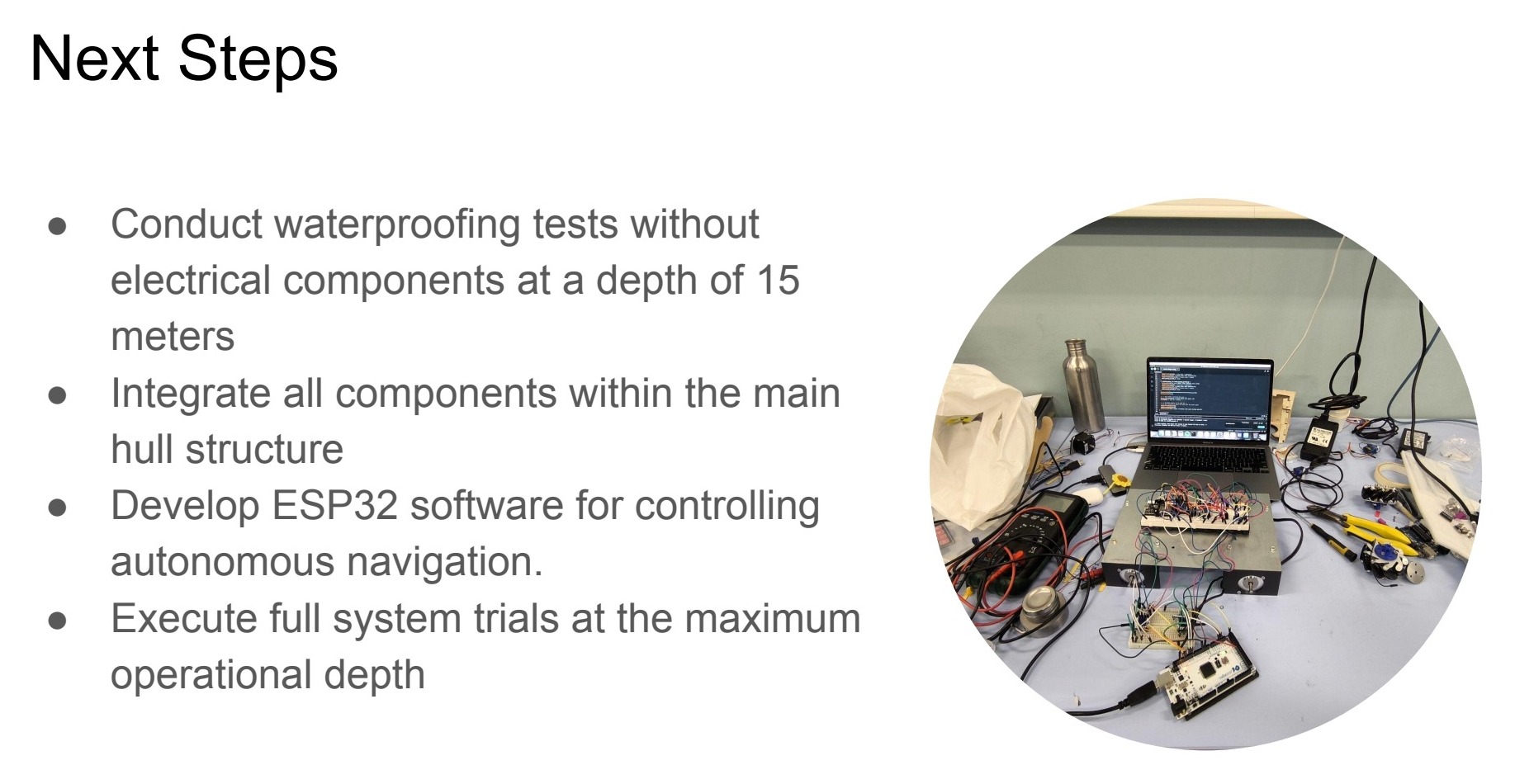
The final slide lays out the next steps exactly like this:
- Conduct waterproofing tests without electrical components at a depth of 15 meters
- Integrate all components within the main hull structure
- Develop ESP32 software for controlling autonomous navigation.
- Execute full system trials at the maximum operational depth
I think this sequence says a lot about the project. It shows the right order of seriousness. First prove the enclosure. Then complete the integration. Then build the control software around hardware you trust. Then run full trials. Underwater engineering rewards patience, and this is exactly the kind of project where discipline matters more than trying to skip to the most exciting part.
How I would recommend approaching a build like this
If someone were using this post as a starting point for their own AUV, my advice would be simple:
- Start with a hull you can test and reopen easily.
- Keep the internal layout modular from the beginning.
- Validate propulsion, sensing, and power in isolation before full integration.
- Treat waterproofing as a milestone, not an assumption.
- Only push autonomy once the platform itself is mechanically and electrically trustworthy.
That may sound less glamorous than jumping straight to “autonomous underwater robot,” but it is how you keep the learning real. The point of the project is not just to assemble interesting parts. It is to build a system whose behavior you actually understand.
Why I like this project
What makes this build compelling to me is that it sits right at the intersection of mechanics, embedded systems, power, sensing, and systems engineering. Every design choice affects several others. If the hull changes, the internal layout changes. If the power architecture changes, the control electronics change. If the sensing stack changes, the autonomy plan changes. That is exactly the kind of engineering work I enjoy most.
And beyond all the technical reasons, there is also something just genuinely likable about the project. It is a PVC hull, printed parts, motors, sensors, and a lot of trial and error — but it is all in service of making a machine that could eventually navigate underwater on its own. That is ambitious, a little messy, very educational, and deeply satisfying in the best way.